6DOF_Quadcopter_Controller
The objective of this project is to develop a controller to control a 6 Degrees of Freedom (DOF) quadcopter based on a common set of requirements. View on Github 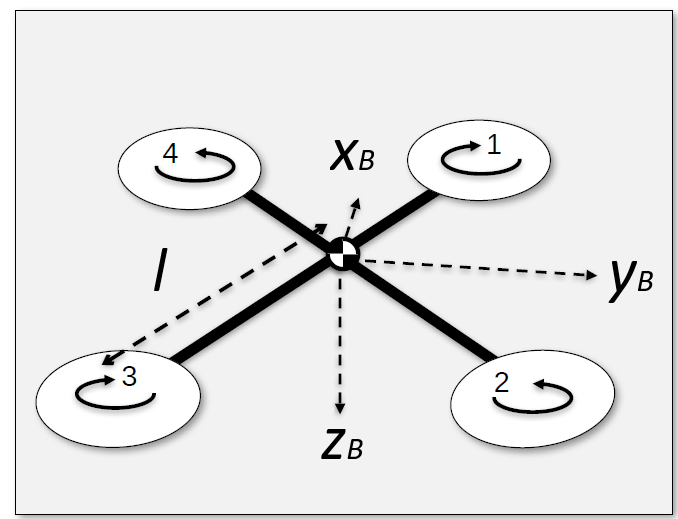

The objective of this project is to develop a controller to control a 6 Degrees of Freedom (DOF) quadcopter based on a common set of requirements. View on Github
This Matlab-Simulink simulator provides a simulation environment to develop and test GN&C FSW algorithms with translation/rotational astrodynamics and GN&C actuator/sensor hardware models. View on Github 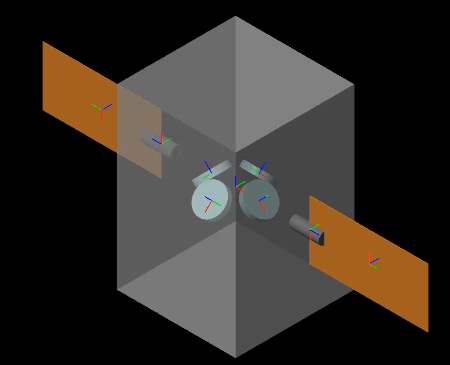
This project analyzes a linear time invariant single mass spring damper system with an open-loop input force (either sinusoidal or unit step) that’s continuously applied on the single mass. View on Github 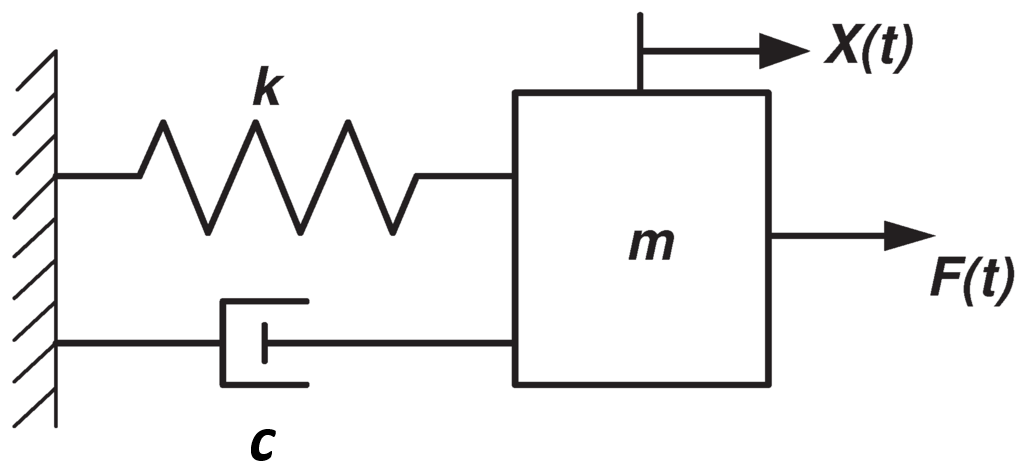
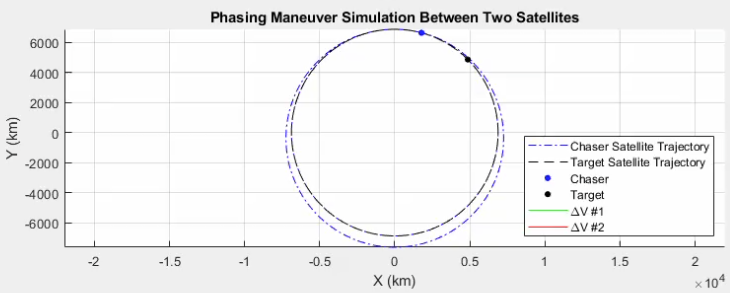
This project focuses on demonstrating coplanar phasing rendezvous maneuvers that a chaser satellite can perform to rendezvous with a target satellite. View on Github